I am an engineer who cares not only about building technical systems, but also about building a thoughtful and meaningful professional life. Over time, I have found that software, automation, robotics, writing, and personal growth are not separate interests. They support each other.
My Professional Direction
My work is shaped by a strong interest in software development, DevOps, automation, cloud infrastructure, robotics, and applied engineering. I enjoy understanding how systems behave in practice, not only in theory. That is one reason I like writing technical articles: writing forces ideas to become clearer.
Why I Write
This website is more than a collection of posts. It is a place where I document what I learn, what I build, and how I think. Technical knowledge becomes more valuable when it is shared clearly. Writing helps me slow down, organize what I know, and leave useful material for other engineers.
What Interests Me Most
- practical software engineering,
- DevOps and infrastructure automation,
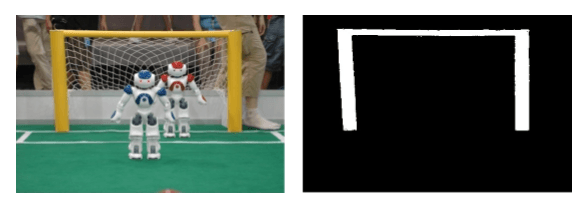
- robotics and autonomous systems,
- the relationship between technology and everyday life,
- continuous personal and professional growth.
Life Beyond Pure Technical Work
I also care about culture, travel, adaptation, and life in Europe. Those experiences shape how I think about discipline, communication, and long-term direction. Engineering is important to me, but so is the broader question of how to live well while doing meaningful work.
Final Thoughts
If there is one idea that connects this site, it is this: growth comes from building, learning, reflecting, and sharing. That is the spirit behind both my technical work and my writing.