Canny edge detection is one of those classic computer vision tools that still deserves attention. Even in an era dominated by deep learning, engineers keep returning to Canny because it is fast, interpretable, and useful for building baselines, debugging camera pipelines, and extracting geometric structure from images.
It is especially valuable when you want to highlight boundaries such as lane markings, road edges, object contours, or structural lines before running later stages of a pipeline.

Why Canny still matters
Most raw images contain far more information than a geometric pipeline needs. Canny helps reduce that image to a sparse set of likely boundaries. That makes it useful in applications such as:
- lane detection prototypes
- document and industrial inspection
- line or contour extraction
- preprocessing for feature-based pipelines
- debugging lighting and contrast issues in camera systems
It is not a full perception system, but it is often a strong first step when the engineer wants structure rather than semantics.
How the algorithm works
Canny is a multi-stage edge detector. Its power comes from the fact that it does not simply compute gradients and stop there. It also tries to suppress noise and keep only meaningful, thin edges.
- Noise reduction: smooth the image, usually with a Gaussian filter.
- Gradient computation: estimate intensity changes, often with Sobel operators.
- Non-maximum suppression: keep only local maxima so the edge stays thin.
- Hysteresis thresholding: use lower and upper thresholds to decide which edges survive.
This last step is one reason Canny stays practical. Weak responses can still survive if they connect to strong edges, which often preserves useful line structure while discarding isolated noise.
What the thresholds really do
Most failures with Canny are not about the algorithm itself. They are about poor threshold choices.
- If the thresholds are too low, noise floods the result.
- If the thresholds are too high, meaningful boundaries disappear.
- If the image is not smoothed well, texture and noise create unstable edges.
That is why Canny tuning is often scene-dependent. A bright daytime road scene may support different thresholds than a nighttime wet road.
import cv2 as cv
image = cv.imread("road.jpg", cv.IMREAD_GRAYSCALE)
blurred = cv.GaussianBlur(image, (5, 5), 0)
edges = cv.Canny(blurred, threshold1=50, threshold2=150)
That simple code hides an important practical truth: preprocessing usually matters as much as the call to cv.Canny() itself.
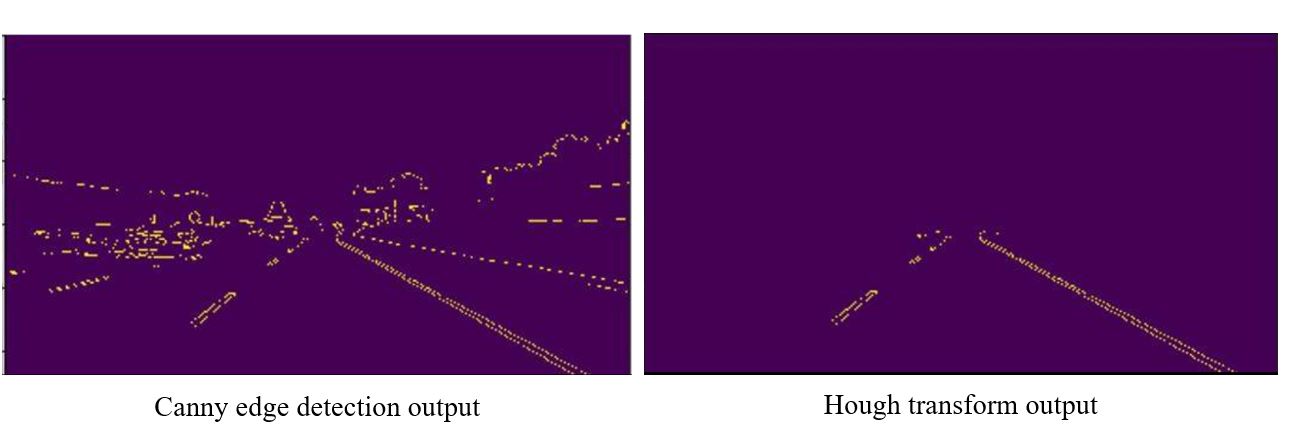
How engineers use Canny in lane detection
Canny became a familiar tool in beginner autonomous-driving projects because it works well as part of a classical lane-detection pipeline. A common sequence is:
- convert the image to grayscale
- blur to reduce noise
- run Canny to extract edges
- apply a region of interest mask
- fit candidate lane lines with a Hough transform

This does not solve all real road cases, but it teaches the underlying geometry clearly and remains useful for debugging modern lane systems.
Where Canny is strong
- fast and cheap to run
- easy to interpret visually
- good for highlighting sharp structure
- useful in classical pipelines and for debugging learned models
Where Canny is weak
- it does not understand semantics
- it is sensitive to threshold selection
- it struggles with shadows, glare, and heavy texture
- it cannot decide whether an edge belongs to a lane, a crack, or a shadow by itself
That is why modern systems usually combine Canny-like geometric ideas with learning-based perception when the scene is complex.
A practical way to use it today
Even if your final product relies on neural networks, Canny still has value. I would use it for:
- building a classical baseline quickly
- validating whether the camera image quality is good enough for geometry
- checking if calibration or blur is destroying useful structure
- explaining perception stages to new engineers on the team
It is one of those rare classical methods that remains useful both educationally and operationally.
Conclusion
Canny edge detection still matters because it turns a noisy image into a much clearer geometric signal. It is not a semantic perception tool, but it remains valuable for lane-finding pipelines, contour extraction, debugging, and building intuition about how vision systems interpret structure. For many engineering teams, Canny is still one of the quickest ways to understand what the camera can and cannot see.
References
- OpenCV Canny edge detection tutorial: https://docs.opencv.org/master/d7/de1/tutorial_js_canny.html
- OpenCV Canny detector tutorial: https://docs.opencv.org/master/da/d5c/tutorial_canny_detector.html
- OpenCV Python Canny tutorial: https://docs.opencv.org/3.4/da/d22/tutorial_py_canny.html

{kind=link}
{kind=link}